Underwater Hull Cleaning Robot [SLM Chiro]
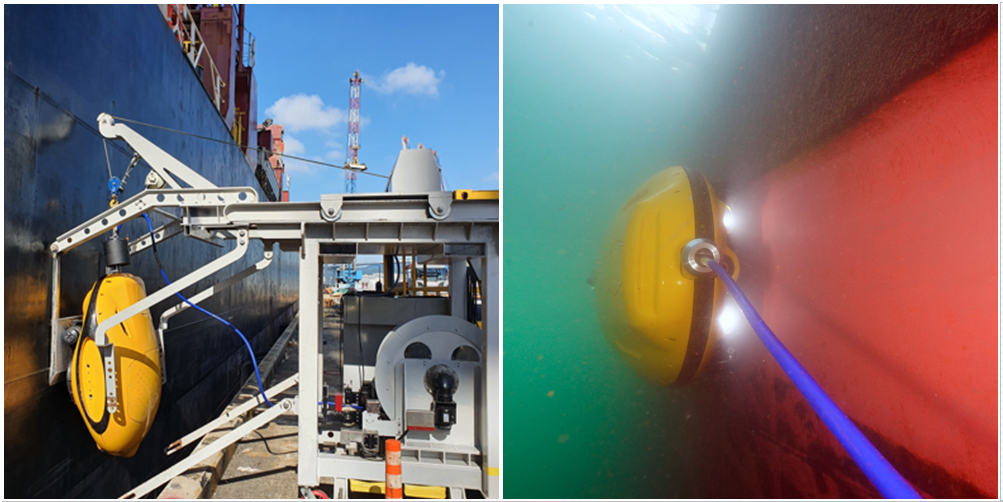
It is attached to the hull instead of the manpower in the poor underwater environment such as the narrow space of the port where the ship is anchored, and then it is used to inspect the condition of the hull through autonomous driving and to clean the fouling on the side of the hull and the bottom of the hull.
Product Description
- 360˚ full-position autonomous driving (manual operation is possible in an emergency or when control is required during autonomous driving)
- High-performance filter to collect debris (filterable microalgae under 50㎛) and sterilization effect using UV lamp
- Tether Control & Operation System
- Launch and Recovery System(dust recovery device) & auto shackle
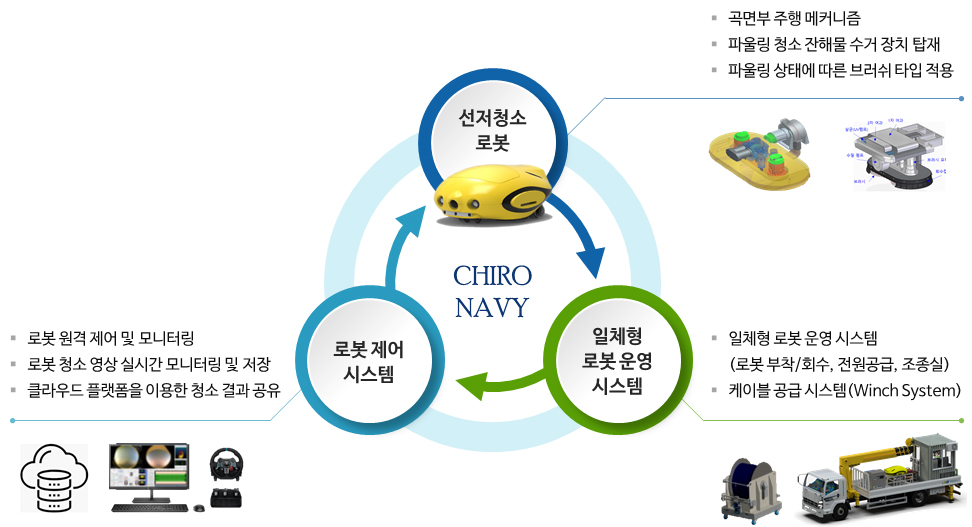
Construction of Underwater Hull Cleaning Robot
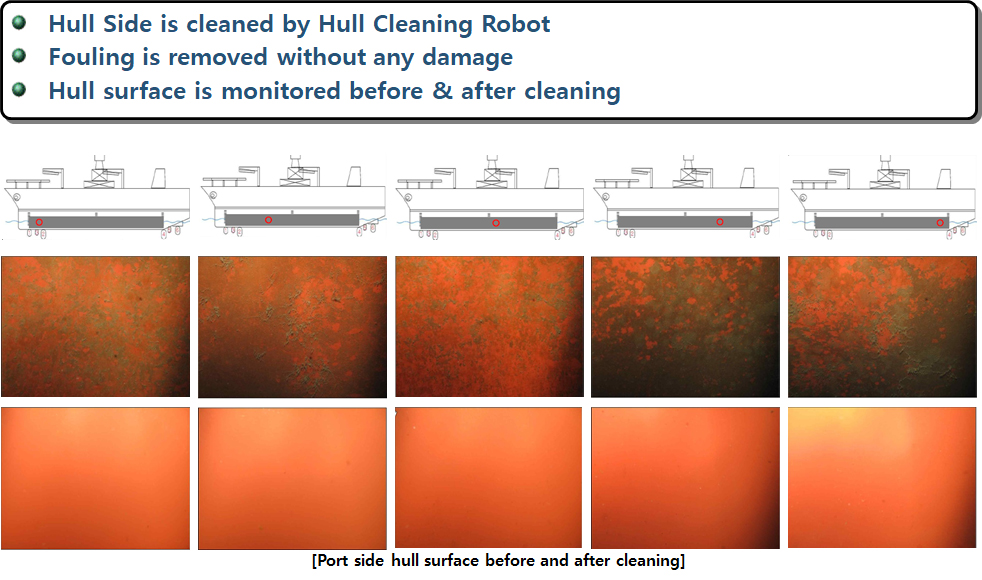
Hull Side Cleaning Results(Port Side)